The float plane was delayed a few hours and I arrived in Anyox in a bit of a panic. It was 3:30pm in the north and the sun was casting some heavy shadows. As beautiful as it was, this was not good for the type of work I came to do. Photogrammetry is the process of taking thousands of photos and stitching them together to produce one large seamless map, as well as producing 3D models of the environment. The shadows make this process less accurate and can even create errors or even a complete failure. However, as I jumped on the quad (ATV) they had ready for me, the perfect overcast system came in and it was time to get to work! I flew two missions in total. The first mission was a faster higher flight to ensure that I would have a product to deliver. The second was a lower slower flight taking much more detailed photos for a better product. Once the missions were complete and I had started the photogrammetry process ,which can take a very long time to finish, I grabbed my drone and headed off to explore!  The first thing I found past the black slag pile was a bridge. It stood out among the rest of the town due to its newer construction. The water way that flowed under it ,Falls creek, was captivating to say the least . It was hard to pull myself away, but after capturing lots of video's (and a selfie) I continued on.
When it was too dark to continue I headed back to the barge. There the 2 man crew and the cook we’re just getting ready for supper. The site custodian had a wealth of information about Anyox and was super keen to tell me all he knew. With this new knowledge I became even more captivated by this once bustling mining town. He told me that Anyox was home to over 4000 people. It was completely self sufficient with running water and a hydro electric dam that powered the entire town and mine... wait did he just say Hydro dam? I went to bed after the Photogrammetry processes had completed successfully . A huge weight had been lifted off my chest, knowing my job was complete until I returned home the next day to reprocess the whole project at full quality. Still, I had a hard time falling asleep knowing I only had until 1pm the following day to find that dam!! The next morning i jumped into my clothes, grabbed my gear and hopped on the quad. The camp custodian said it was only 4-5 kms up one of the many back roads and told me I should have no problem finding it. About 20 minutes down the trail on the quad, pushing through a section of completely over grown alder bushes, I stumbled upon an open field like area. I looked up at my surroundings and just like back at the town the remnants of past infrastructures started to show them selves.
I have to admit that after a while i was starting to wonder if i had indeed taken the correct road. Knowing that if something malfunctioned on the quad and i had to walk back it was going to take well over 4 hours... I started to consider turning back. Then, within seconds of those thoughts i came winding down a hill side... and there it was! I'd consider myself someone who has seen some incredible landscapes and beautiful mountain top views in my life but nothing compared to seeing this concrete marvel of a wall nestled in between a steep overgrown valley.
As I headed back to the barge I tried to see everything I could, knowing that my time there was coming to an end. I packed up my gear and headed down to the float plane. As we flew back to Prince Rupert I looked down at Anyox and realized that I had really only explored a small area and couldn't help but wonder what other treasures lay beneath the old over grown town.
Thanks for reading!
5 Comments
 Over the last couple years i dove head first into a few major projects and one of these was an onboard computer mount for my DJI M600 Pro UAV. It's general purpose was to allow me to record general data such as audio and a secondary video feed but ultimately the end goal was to record Lidar data! If your not familiar with Lidar data it is a range detection sensor that has incredible applications but my primary use would be to build 3D maps like this next picture and video. 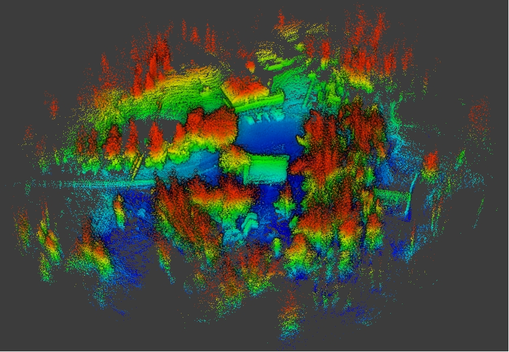 These 3D maps also known as "point clouds" can be processed with software to produce useful data in a handful of local industries such as Forestry, Mining, Agriculture and Environmental Surveys such as tree counts and terrain data for steep slope logging as well as road layouts and volume calculations just too name a few. After months of research I decided to purchase a OS1-16 Lidar sensor from Ouster and a Raspberry Pi 3B+... for the people that think I just ordered a snack to go with my Lidar sensor a Raspberry Pi 3B+ is infact a SBC (single board computer). I remember opening the Ouster sensor and the Raspberry pi and just staring at them thinking "how hard could this be?" I was about to find out! The first task was to mount this computer to the UAV and this was the part that i can honestly say i loved every part of. Since I had full access to a 3 axis CNC milling machine and nothing but time to kill I started designing and before long had built the first prototype for the new onboard computer UAV mount and after a few different models the SV-MSPU was born! Watch the CNC video if your interested on how it was built.  Now I had a computer on my UAV capable of recording everything I wanted ... except the one thing I had built it for... the Lidar data. I knew that Lidar data was very large data to work with but I will admit that I completely under estimated the data capture rate (1.4Gb per minute) I spent months testing other SBC's and finally ended up with the Raspberry pi 4b (RPi4b). With even more tweaking I was capable to record all Lidar data flawlessly... success! I since have been advancing in this project consistently and 2 months ago I finally processed my very first aerial Lidar map recorded on my M600 Pro UAV. I have a long way to go yet but i'll take the victories as they come. Thanks for reading and if you have any questions or want to help out feel free to contact me.  |
AuthorChris Spletzer ArchivesCategories |












 RSS Feed
RSS Feed
