 Over the last couple years i dove head first into a few major projects and one of these was an onboard computer mount for my DJI M600 Pro UAV. It's general purpose was to allow me to record general data such as audio and a secondary video feed but ultimately the end goal was to record Lidar data! If your not familiar with Lidar data it is a range detection sensor that has incredible applications but my primary use would be to build 3D maps like this next picture and video. 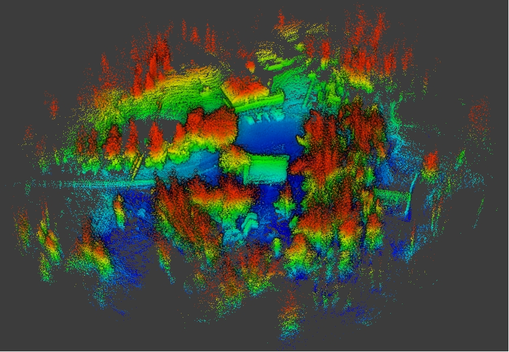 These 3D maps also known as "point clouds" can be processed with software to produce useful data in a handful of local industries such as Forestry, Mining, Agriculture and Environmental Surveys such as tree counts and terrain data for steep slope logging as well as road layouts and volume calculations just too name a few. After months of research I decided to purchase a OS1-16 Lidar sensor from Ouster and a Raspberry Pi 3B+... for the people that think I just ordered a snack to go with my Lidar sensor a Raspberry Pi 3B+ is infact a SBC (single board computer). I remember opening the Ouster sensor and the Raspberry pi and just staring at them thinking "how hard could this be?" I was about to find out! The first task was to mount this computer to the UAV and this was the part that i can honestly say i loved every part of. Since I had full access to a 3 axis CNC milling machine and nothing but time to kill I started designing and before long had built the first prototype for the new onboard computer UAV mount and after a few different models the SV-MSPU was born! Watch the CNC video if your interested on how it was built.  Now I had a computer on my UAV capable of recording everything I wanted ... except the one thing I had built it for... the Lidar data. I knew that Lidar data was very large data to work with but I will admit that I completely under estimated the data capture rate (1.4Gb per minute) I spent months testing other SBC's and finally ended up with the Raspberry pi 4b (RPi4b). With even more tweaking I was capable to record all Lidar data flawlessly... success! I since have been advancing in this project consistently and 2 months ago I finally processed my very first aerial Lidar map recorded on my M600 Pro UAV. I have a long way to go yet but i'll take the victories as they come. Thanks for reading and if you have any questions or want to help out feel free to contact me. 
0 Comments
Leave a Reply. |
AuthorChris Spletzer ArchivesCategories |
 RSS Feed
RSS Feed
